
Un equipo del Instituto Coreano de Ciencia y Tecnología (KIST) ha desarrollado OCTOID, un sistema robótico blando que imita tres habilidades clave de los pulpos: el camuflaje, el movimiento direccional y la capacidad de agarrar objetos. El avance, publicado en Advanced Functional Materials, muestra un tipo de robot blando que por primera vez combina estas funciones en un único material programable.
Los investigadores partieron de un problema conocido en la robótica blanda: la mayoría de los robots inspirados en pulpos solo replican un aspecto, como la flexibilidad o la forma de agarrar. OCTOID supera esa limitación gracias a unos materiales llamados elastómeros de cristal líquido colestéricos (CLCE), que cambian de color y forma según cómo se ordenan sus moléculas cuando reciben calor generado eléctricamente.
El sistema está construido en capas. La capa activa puede cambiar de color y deformarse con suavidad, mientras que la capa pasiva mantiene su rigidez y dirige la fuerza del movimiento. Combinando ambas, los científicos fabricaron diferentes tipos de “patas”: unas para camuflarse, otras para moverse y otras para agarrar objetos. Todo esto funciona sin añadir motores externos ni componentes rígidos.
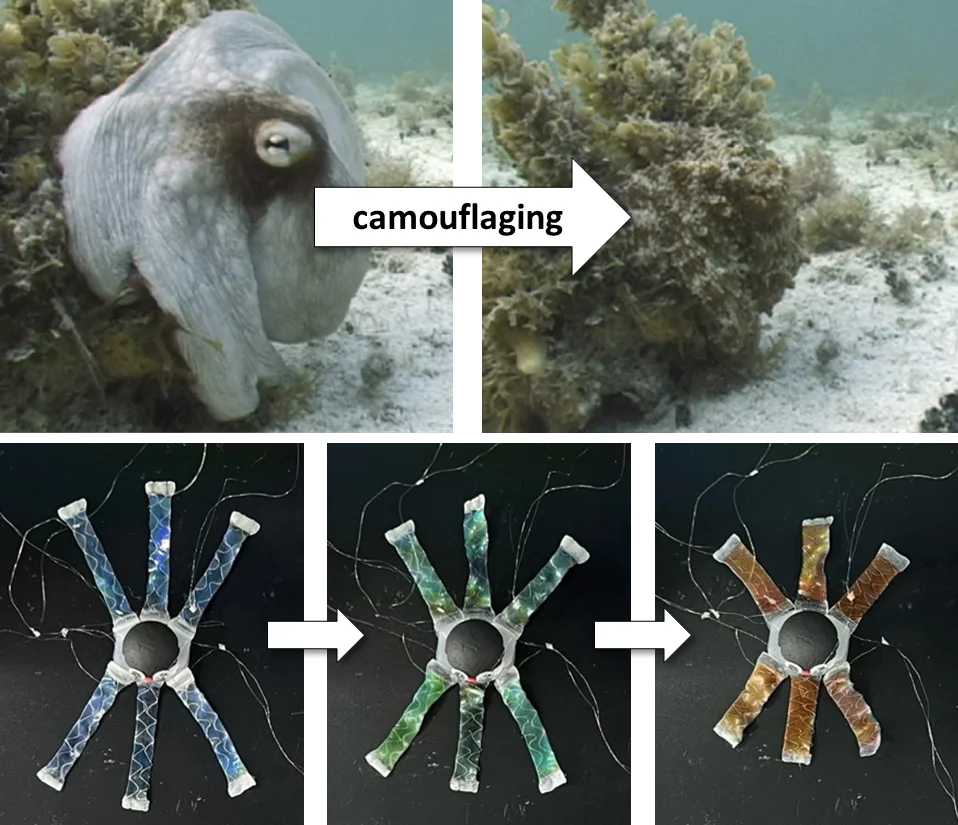
Para reproducir el camuflaje, los CLCE se programan para reflejar colores distintos: azul, verde o rojo. Una pequeña corriente eléctrica provoca un calentamiento interno que altera la estructura del material, lo que cambia tanto el color como la longitud de la pata. Este proceso se repite de forma reversible y estable durante decenas de ciclos.
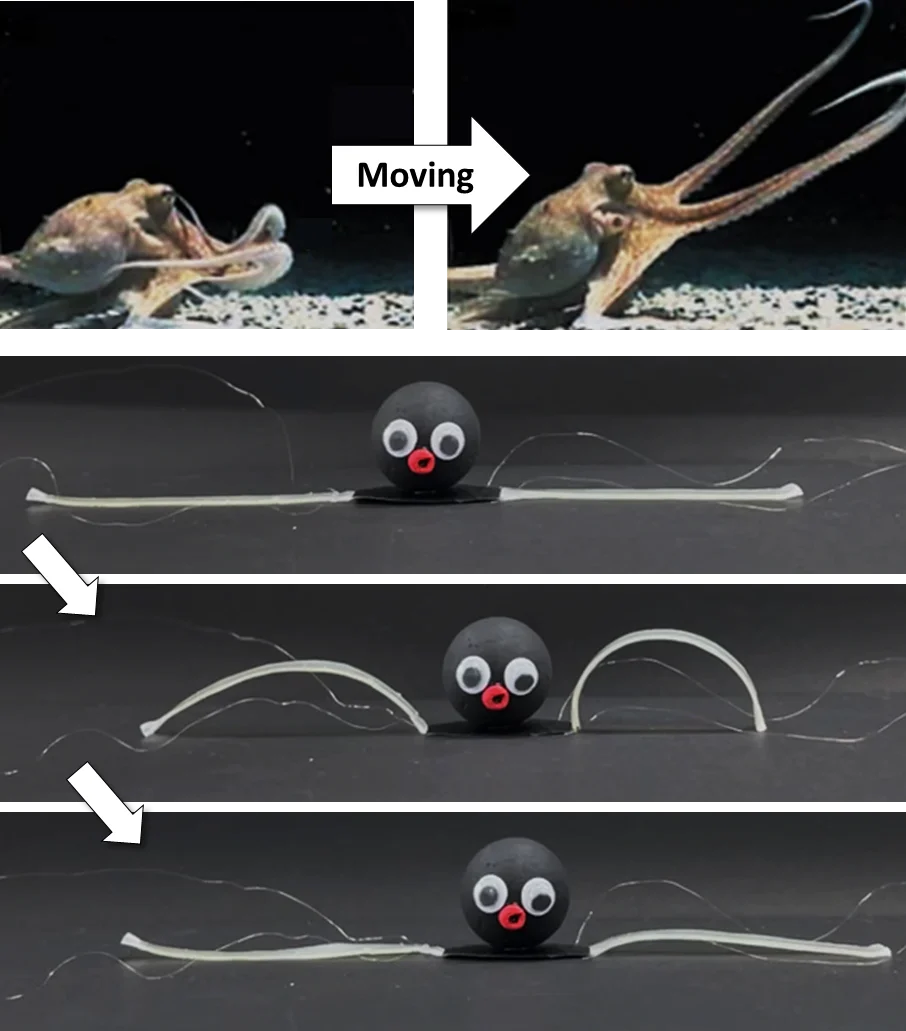
El movimiento también se basa en la misma lógica. Las patas destinadas a avanzar se doblan hacia un lado cuando reciben energía, anclándose al suelo y empujando el cuerpo del robot hacia adelante cuando el ciclo se invierte. Este movimiento alternado permite que OCTOID avance de forma controlada. Las pruebas mostraron que su curvatura es repetible, estable y ajustable en función de la potencia aplicada.
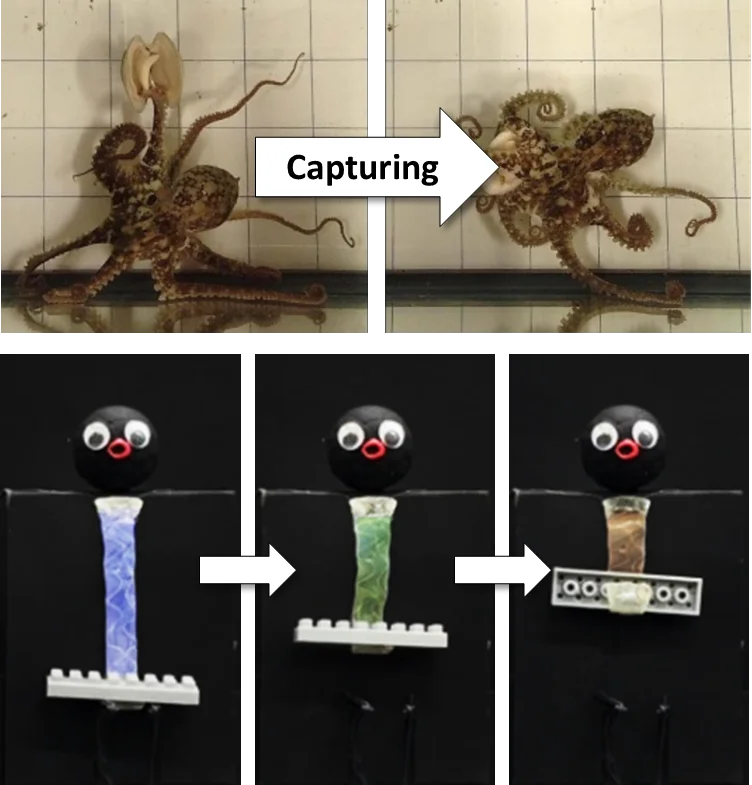
Para el agarre, el equipo diseñó una pata con zonas activas y pasivas distribuidas de forma asimétrica. Al calentarse, unas se contraen y otras se curvan, lo que genera un movimiento envolvente capaz de sostener objetos de distintos tamaños y texturas. Una sola pata, que apenas pesa 0,20 gramos, logró levantar 30 veces su propio peso, un rendimiento superior al de muchos organismos naturales.
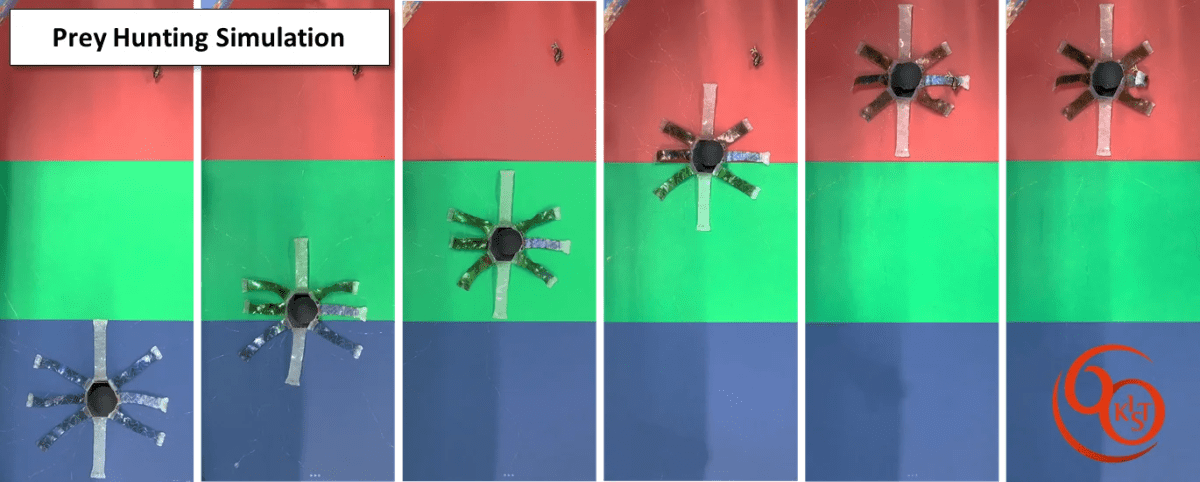
Después de integrar todas las patas en un solo cuerpo, los investigadores demostraron que OCTOID puede desplazarse mientras cambia de color para adaptarse al entorno y, finalmente, capturar un objeto, imitando así una secuencia de caza. El robot incluso mostró colores distintos a cada lado para camuflarse en entornos mixtos, como sucede en zonas submarinas donde conviven algas de varios tonos.
Aunque el sistema aún tiene limitaciones —como la velocidad de respuesta térmica y el peso de los cables calefactores— el equipo considera que este enfoque abre la puerta a robots blandos más autónomos, capaces de adaptarse físicamente a su entorno en tiempo real. Aplicaciones futuras podrían incluir exploración subacuática, rehabilitación médica, dispositivos táctiles o sistemas de camuflaje activo.
OCTOID representa una prueba clara de que los materiales blandos programables pueden combinar funciones ópticas y mecánicas complejas dentro de un mismo cuerpo, un paso importante hacia máquinas que aprenden, se transforman y reaccionan de manera similar a los organismos vivos.





