La exploración actual de Marte y otros cuerpos planetarios sigue marcada por una limitación estructural difícil de resolver: la dependencia constante de la Tierra. Cada movimiento, cada decisión y cada análisis requieren planificación previa debido a los retrasos en la comunicación, que pueden alcanzar entre varios minutos y más de veinte, lo que ralentiza de forma directa el ritmo de trabajo científico sobre el terreno.
A esa limitación se suma una cuestión operativa clave. Los rovers están diseñados para ser extremadamente seguros y eficientes, lo que implica desplazamientos lentos y muy controlados sobre terrenos potencialmente peligrosos. El resultado es que, en la práctica, estas misiones exploran áreas relativamente pequeñas y avanzan solo unos cientos de metros al día, reduciendo la diversidad de muestras que pueden estudiar.
El enfoque probado en este estudio plantea un cambio claro en esa lógica operativa. En lugar de depender de instrucciones constantes desde la Tierra, el robot es capaz de ejecutar una secuencia de acciones de forma semiautónoma, desplazándose entre distintos puntos de interés y realizando análisis sin supervisión continua en cada paso.
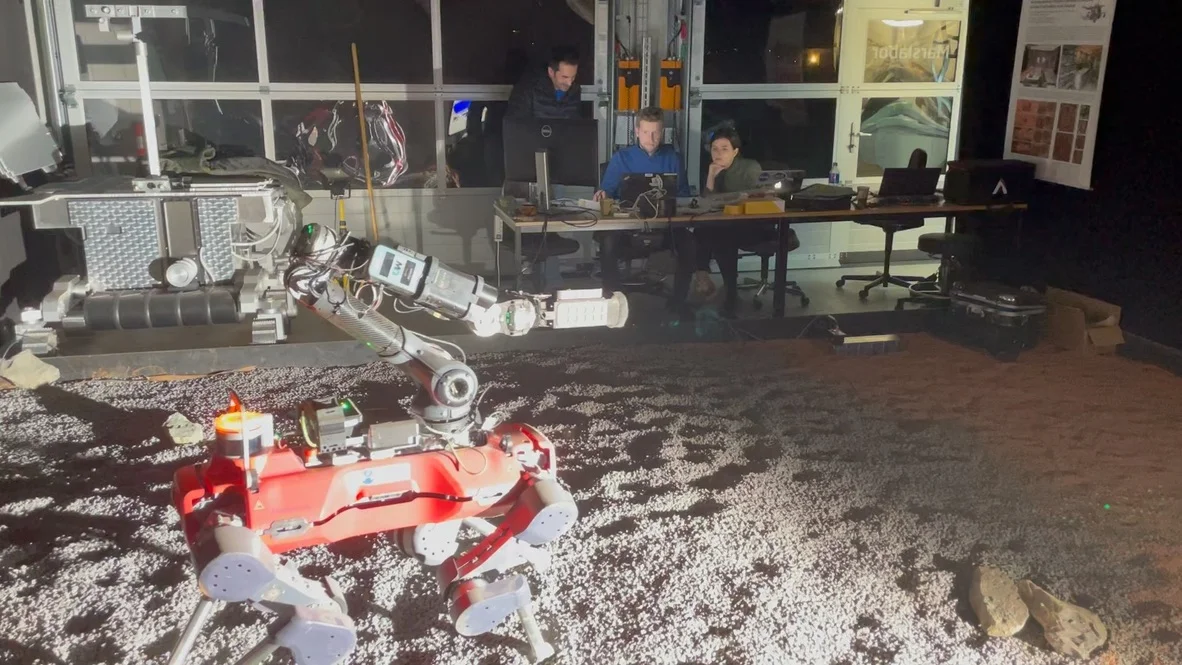
Para ello se utilizó un robot cuadrúpedo llamado ANYmal, que se mueve mediante patas en lugar de ruedas. Este diseño le permite adaptarse mejor a superficies irregulares y sortear obstáculos con mayor flexibilidad. Además, incorpora un brazo robótico que transporta instrumentos científicos compactos capaces de analizar directamente las rocas en su ubicación.
Entre estos instrumentos destaca un sistema de imagen microscópica, que permite observar detalles muy pequeños en la superficie de los materiales, y un espectrómetro Raman, una herramienta que identifica la composición química de una roca analizando cómo interactúa la luz con sus moléculas. Este tipo de análisis es clave para detectar biofirmas, es decir, señales químicas que podrían indicar actividad biológica pasada.
Las pruebas se llevaron a cabo en un entorno controlado que simula condiciones planetarias, utilizando regolito —el polvo característico de superficies como la Luna o Marte— y rocas análogas a las que podrían encontrarse en esos entornos. El robot se desplazó de forma autónoma hacia varios objetivos, desplegó sus instrumentos y envió los datos obtenidos para su análisis.
El contraste con el enfoque tradicional es significativo en términos de tiempo. Mientras que una misión guiada paso a paso por científicos necesitó más de cuarenta minutos para completar un conjunto de análisis, las misiones semiautónomas lograron resultados comparables en un rango de entre doce y veintitrés minutos, desplazándose además entre múltiples objetivos.
Este aumento de velocidad no implicó una pérdida de precisión en los resultados. El sistema identificó correctamente distintos tipos de rocas relevantes desde el punto de vista científico, incluyendo basaltos, carbonatos y materiales similares a los presentes en la superficie lunar. Esto sugiere que el modelo puede mantener un nivel de calidad adecuado mientras amplía el alcance de la exploración.
El cambio más relevante no está solo en la tecnología, sino en cómo se reorganiza la exploración. Si un robot puede analizar varias muestras sin depender de instrucciones constantes, la superficie cubierta durante una misión podría multiplicarse, permitiendo a los científicos seleccionar con mayor criterio los lugares donde concentrar análisis más detallados o futuras misiones.
Aun así, los resultados deben interpretarse dentro de su contexto experimental. Las pruebas se realizaron en condiciones simuladas, lo que significa que todavía no se han enfrentado a factores reales como la radiación, las temperaturas extremas o el comportamiento del polvo en otros planetas, que pueden afectar al rendimiento de los sistemas.
Lo que sí se perfila con claridad es una dirección en la evolución de la exploración planetaria. En lugar de misiones extremadamente controladas y lentas, empieza a plantearse un modelo más ágil, donde robots con cierto grado de autonomía amplían la capacidad de análisis sin sustituir completamente la supervisión humana.
Si este enfoque se valida en futuras misiones reales, el impacto sería directo: más terreno explorado en menos tiempo, mayor diversidad de datos y una capacidad más eficaz para identificar tanto recursos útiles como posibles indicios de vida pasada en la Luna, Marte y otros entornos planetarios.