
Ingenieros de la Universidad de Cincinnati han diseñado un dron que puede volar y mantenerse estable alrededor de una fuente de luz sin utilizar inteligencia artificial. Inspirado en el comportamiento de las polillas, el dispositivo ajusta su vuelo mediante un sistema de retroalimentación en tiempo real que no requiere cálculos complejos ni sensores avanzados.
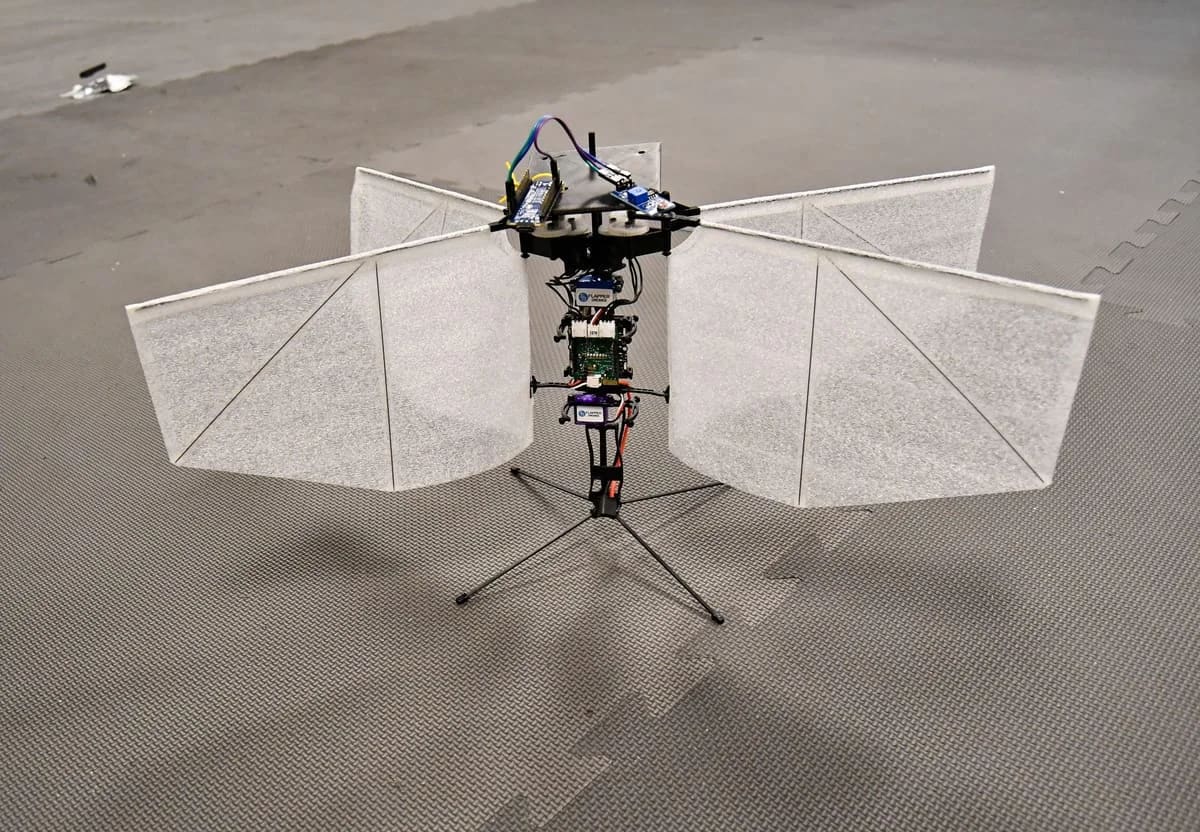
El proyecto, liderado por el profesor adjunto Sameh Eisa, busca replicar la eficiencia y precisión del vuelo de los insectos. El dron, con alas flexibles de tela y alambre, logra permanecer suspendido y seguir objetos en movimiento imitando los sutiles movimientos de una polilla atraída por una llama.

A diferencia de los drones convencionales, no necesita inteligencia artificial ni GPS. Su sistema mide constantemente el rendimiento y corrige el rumbo de manera automática, aplicando un método conocido como “búsqueda de extremos”. Este principio le permite encontrar el punto óptimo para mantener su equilibrio y posición en el aire.
El enfoque recuerda a cómo los insectos se adaptan a su entorno sin procesar grandes cantidades de información. “Las polillas lo hacen parecer fácil”, explicó Eisa. “Nuestro dron aplica un principio simple, biológicamente plausible, que imita la naturaleza sin requerir inteligencia artificial”.
El secreto: un control biológico sin inteligencia artificial
El dron utiliza pequeños ciclos de prueba y ajuste en cada aleteo. Si una maniobra mejora la estabilidad o la orientación, el sistema la refuerza en el siguiente movimiento. Si la empeora, cambia el patrón de vuelo. Así consigue adaptarse a condiciones cambiantes, como el viento o el desplazamiento de la luz, con una sorprendente precisión.
Las pruebas realizadas en el laboratorio de Eisa mostraron que el dron puede mantenerse estable durante largos periodos y reaccionar ante estímulos en fracciones de segundo. Incluso logró reproducir los característicos balanceos que las polillas utilizan para mantenerse flotando frente a una fuente luminosa.
El principio de búsqueda de extremos, además, podría aplicarse en drones de menor tamaño o incluso en robots acuáticos y terrestres. Su bajo consumo de energía y la ausencia de algoritmos complejos lo convierten en una alternativa eficiente para misiones en espacios reducidos o de difícil acceso.
Eisa y su equipo creen que esta tecnología podría inspirar una nueva generación de vehículos autónomos sin dependencia de la inteligencia artificial, capaces de tomar decisiones simples a partir de su propia experiencia de vuelo.





