
Un avance en robótica colectiva ha demostrado que comportamientos sofisticados pueden emerger de reglas de interacción extremadamente simples. Científicos han desarrollado "link-bots", cadenas de robots individuales conectados por enlaces rígidos que exhiben capacidades de navegación, transporte y cooperación sin requerir programación compleja ni sistemas de comunicación avanzados.
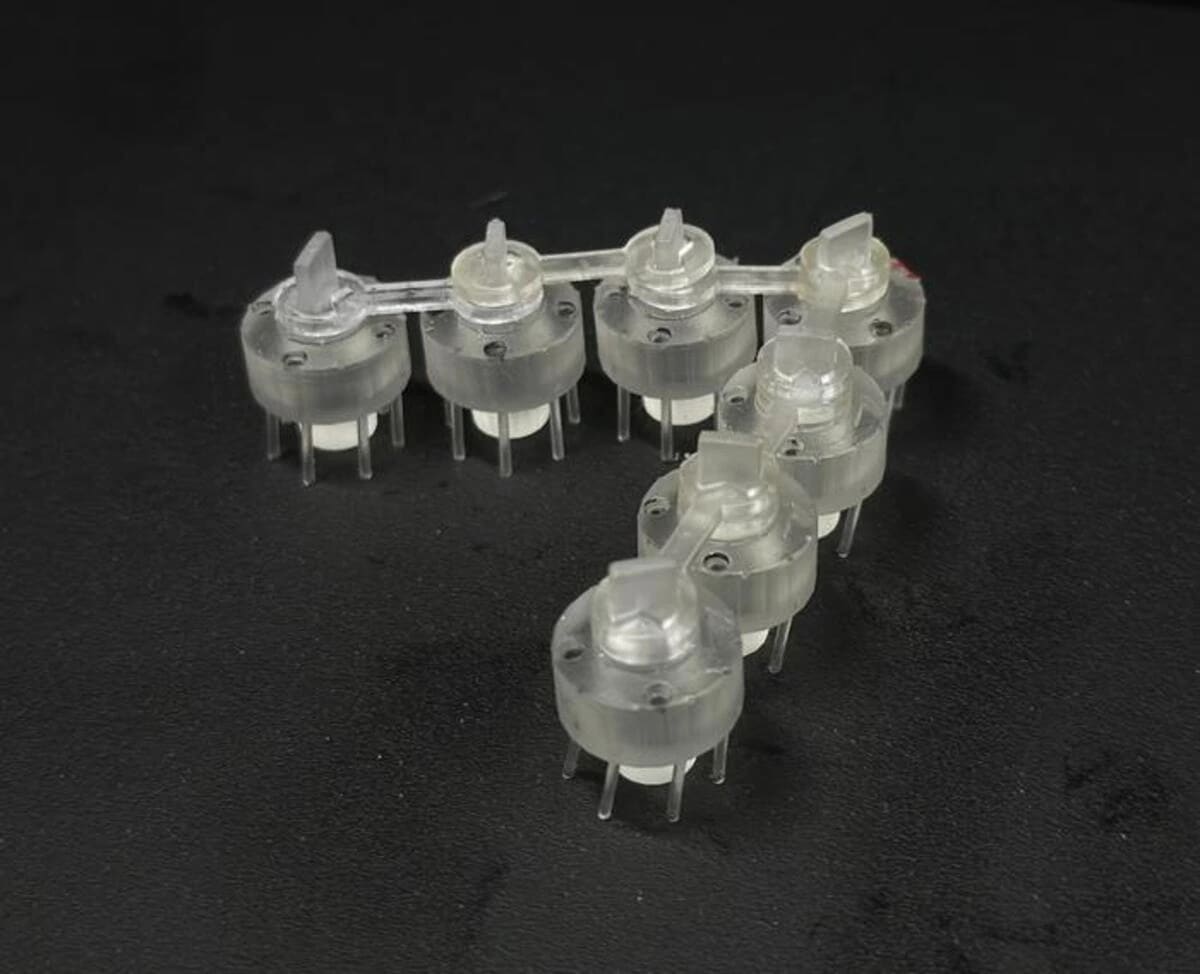
El sistema consiste en robots cilíndricos autopropulsados de 1.5 centímetros de diámetro equipados con siete patas inclinadas que les permiten moverse sobre superficies vibratorias. Cuando se conectan mediante enlaces rígidos en formación de V, estos robots individuales desarrollan colectivamente funcionalidades que ningún robot solitario podría lograr independientemente.
Los investigadores identificaron dos modos dinámicos fundamentales que controlan todo el comportamiento del sistema: "respiración", donde el ángulo central de la V se abre y cierra, y "aleteo", donde las cadenas laterales se doblan hacia adentro y hacia afuera. Estos movimientos simples se combinan para producir tres patrones de marcha distintivos cuando el link-bot encuentra obstáculos.
Las capacidades emergentes incluyen navegación adaptativa en entornos complejos: los link-bots pueden atravesar espacios estrechos, rodear obstáculos, seguir superficies curvas y escapar de laberintos. Sorprendentemente, el mismo sistema puede alternar entre comportamientos exploratorios (atravesar terrenos) y explotadores (permanecer en áreas específicas) simplemente ajustando los ángulos de conexión entre robots.
En términos de transporte, los link-bots demuestran capacidades selectivas de manipulación de objetos. Dependiendo de su configuración geométrica, pueden empujar objetos hacia adelante, tirar de ellos hacia atrás, envolverlos completamente, rotarlos o simplemente evitarlos. Esta versatilidad se logra únicamente mediante la modificación de parámetros geométricos internos.
Los experimentos revelan comportamientos sociales emergentes cuando múltiples link-bots interactúan. Pueden cooperar para atravesar espacios que individualmente no podrían negociar, o competir cuando sus objetivos entran en conflicto. En escenarios de transporte colaborativo, un link-bot puede empujar mientras otro tira del mismo objeto, logrando movimiento coordinado sin comunicación explícita.
El diseño utiliza restricciones geométricas como único mecanismo de control. Tres parámetros principales definen el comportamiento: longitud de enlaces, ángulo de extensión y ángulo de muesca. Esta simplicidad contrasta dramáticamente con enfoques tradicionales de robótica de enjambre que requieren sensores sofisticados, capacidades de computación y protocolos de comunicación complejos.
Los modelos computacionales confirman que cada robot individual exhibe movimiento browniano activo, similar al observado en sistemas biológicos. Sin embargo, cuando se conectan en la configuración de link-bot, emergen patrones de movimiento dirigido y comportamientos funcionales coherentes, demostrando cómo la organización estructural puede transformar actividad aleatoria en funcionalidad útil.
Las aplicaciones potenciales abarcan múltiples escalas y dominios industriales. A microescala, los principios podrían aplicarse en sistemas de liberación dirigida de medicamentos o micromáquinas biomédicas. A macroescala, podrían desarrollarse sistemas de transporte autónomos para terrenos difíciles, robots de vigilancia ambiental o mecanismos de control de flujo de tráfico.
La investigación demuestra que sistemas activos similares a polímeros pueden exhibir comportamientos similares a organismos vivos mediante restricciones físicas simples. Esta aproximación evita las limitaciones computacionales y energéticas de sistemas robóticos convencionales, sugiriendo una nueva dirección para el desarrollo de robótica blanda y materiales inteligentes.
Los link-bots pueden autoclasificarse en superficies curvas según sus propiedades geométricas, abriendo posibilidades para sistemas de separación y clasificación automatizados. Diferentes configuraciones de ángulos producen comportamientos distintivos cuando encuentran curvaturas específicas, permitiendo segregación sin sensores externos.
El principio de escalabilidad universal representa una ventaja crucial del sistema. Los mismos principios geométricos funcionan independientemente del tamaño, material o método de propulsión de los robots individuales, sugiriendo aplicaciones desde nanorobots hasta sistemas de construcción a gran escala.
Fuente: Science Advances





