
La frontera entre la ciencia ficción y la realidad se difumina una vez más en los laboratorios chinos. Un equipo de investigadores de la Universidad Shanghai Jiao Tong ha logrado crear el primer robot anfibio verdaderamente multimodal, capaz de caminar por tierra, arrastrarse bajo el agua y nadar con eficiencia sorprendente, todo sin necesidad de cambiar su estructura física.
Este avance no es solo una curiosidad científica, sino un salto evolutivo en la robótica blanda que promete revolucionar campos tan diversos como el rescate en desastres, la exploración submarina y el monitoreo ambiental en condiciones extremas. Lo que hace especial a este robot no es solo su versatilidad, sino la elegancia tecnológica que permite semejante adaptabilidad.
La revolución de los actuadores electrohidráulicos
El corazón de esta maravilla tecnológica son los actuadores electrohidráulicos blandos, una innovación que representa años de investigación en robótica flexible. Fuyi Fang, investigador principal del proyecto, explica que "a diferencia de los robots rígidos tradicionales, los robots blandos ofrecen mayor adaptabilidad ambiental y seguridad, y la tecnología de accionamiento electrohidráulico es uno de los avances más importantes en el campo".
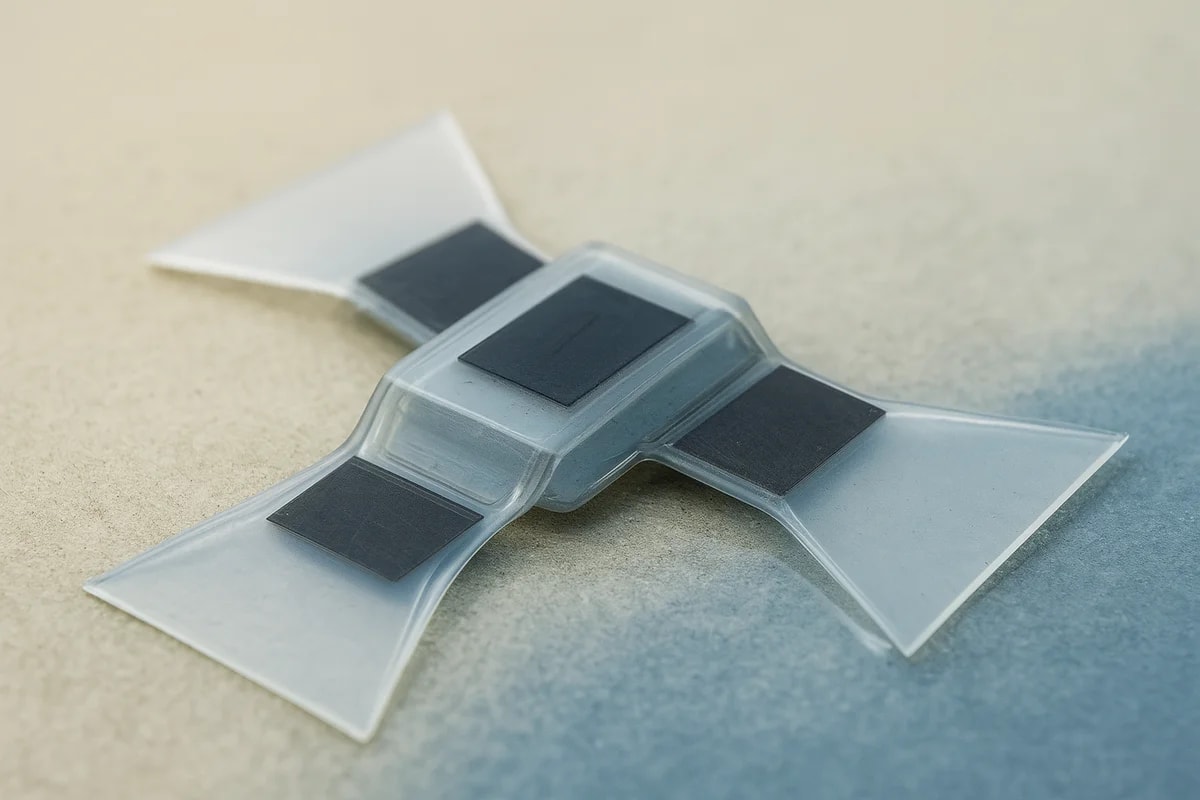
Cada actuador consiste en una bolsa sellada llena de aceite de silicona y recubierta de electrodos de carbono en ambos lados. Cuando se aplica una señal eléctrica de alto voltaje, los electrodos positivo y negativo se atraen, comprimiendo el aceite de silicona y provocando la expansión del actuador. Es una conversión inteligente de energía eléctrica en energía hidráulica, que luego se transforma en movimiento mecánico puro.
Los investigadores añadieron un esqueleto con forma de aleta y puntas especiales en la parte frontal, traduciendo el movimiento de expansión en flexión controlada. Esta aparente simplicidad esconde una complejidad ingenieril extraordinaria que permite al robot adaptarse tanto a entornos terrestres como acuáticos sin modificación alguna.
Tres modos de locomoción, una sola máquina
Con tres aletas electrohidráulicas distribuidas simétricamente, el robot demuestra una versatilidad que desafía las limitaciones tradicionales de la robótica. En modo de arrastre terrestre, genera impulso hacia adelante mediante la flexión y recuperación periódicas de la aleta delantera. El delicado diseño de la punta de la aleta crea fricción desequilibrada con el suelo, permitiendo avanzar a rastras a 2,9 cm/s con una frecuencia óptima de 6 Hz.
El modo de arrastre submarino utiliza un principio completamente diferente. La flotabilidad del agua reduce considerablemente la fricción con el fondo, y la propulsión se genera principalmente por la interacción entre las aletas y el agua. A una frecuencia de 1,6 Hz, la velocidad de arrastre submarino alcanza 3,2 cm/s, demostrando cómo el mismo mecanismo se adapta a medios físicos distintos.
Pero el modo más impresionante es la natación. Cuando las tres aletas funcionan simultáneamente, el robot genera impulsos ascendentes simétricos para elevación vertical. Las simulaciones de fluidos revelaron que la oscilación de las aletas crea anillos de vórtice debajo del robot, y la liberación e interacción de estos anillos mejora la eficiencia de propulsión hasta alcanzar velocidades de 5,9 cm/s.
Resistencia extrema: del ártico al trópico
La verdadera prueba de cualquier robot exploratorio es su capacidad para operar en condiciones adversas. Los investigadores sometieron su creación a temperaturas extremas con resultados sorprendentes: el robot funciona perfectamente en un rango de -20°C a 70°C, una amplitud térmica que abarca desde el Ártico hasta los desiertos más calurosos.
En agua caliente a 61,3°C, el rendimiento del robot fue prácticamente idéntico al de temperatura ambiente, gracias a la estabilidad térmica del aceite de silicona y la resistencia de los electrodos. En agua fría a 2,1°C, aunque el aumento de viscosidad del aceite redujo ligeramente la velocidad de respuesta, el robot mantuvo una velocidad de nado de 2,7 cm/s, demostrando adaptabilidad excepcional a bajas temperaturas.
Un futuro de exploración sin límites
Las aplicaciones potenciales de este robot anfibio son vastas y emocionantes. En monitoreo ambiental, podría rastrear contaminación en ríos y lagos, transitando sin problemas entre diferentes medios. En operaciones de búsqueda y rescate, su capacidad para navegar terrenos inundados o parcialmente sumergidos podría salvar vidas en situaciones donde otros robots fallan.
La inspección de tuberías, especialmente en sistemas complejos que combinan secciones terrestres y subacuáticas, representa otra aplicación prometedora. Su capacidad de adaptarse a diferentes entornos sin reorganización estructural lo hace especialmente valioso para tareas en entornos naturales complejos y cambiantes.
El equipo de investigación, que incluye científicos de las universidades Shanghai Jiao Tong, Tongji y Northwestern Polytechnical, continúa optimizando materiales y procesos de fabricación. Su objetivo es claro: convertir este prototipo en una herramienta práctica para la exploración ambiental que pueda operar donde ningún otro robot ha llegado antes.
Fuentes: Cyborg and Bionic Systems | SPJ





