
Un equipo de investigadores liderado por la Universidad Tecnológica del Sur de China ha desarrollado un avanzado perro robótico anfibio que puede desplazarse con eficiencia tanto en tierra como en agua. A diferencia de otros diseños inspirados en insectos o reptiles, este robot adopta patrones de movimiento de mamíferos, logrando una agilidad superior y una transición fluida entre medios.
La investigación, publicada en la revista Bioinspiration and Biomimetics de IOP Publishing, demuestra cómo el uso de locomoción similar a la de los perros permite al robot superar limitaciones tradicionales como la baja velocidad de nado y la escasa estabilidad acuática. El sistema se basa en técnicas de planificación de trayectoria bioinspirada, combinando anatomía mecánica con principios de la biomecánica animal.
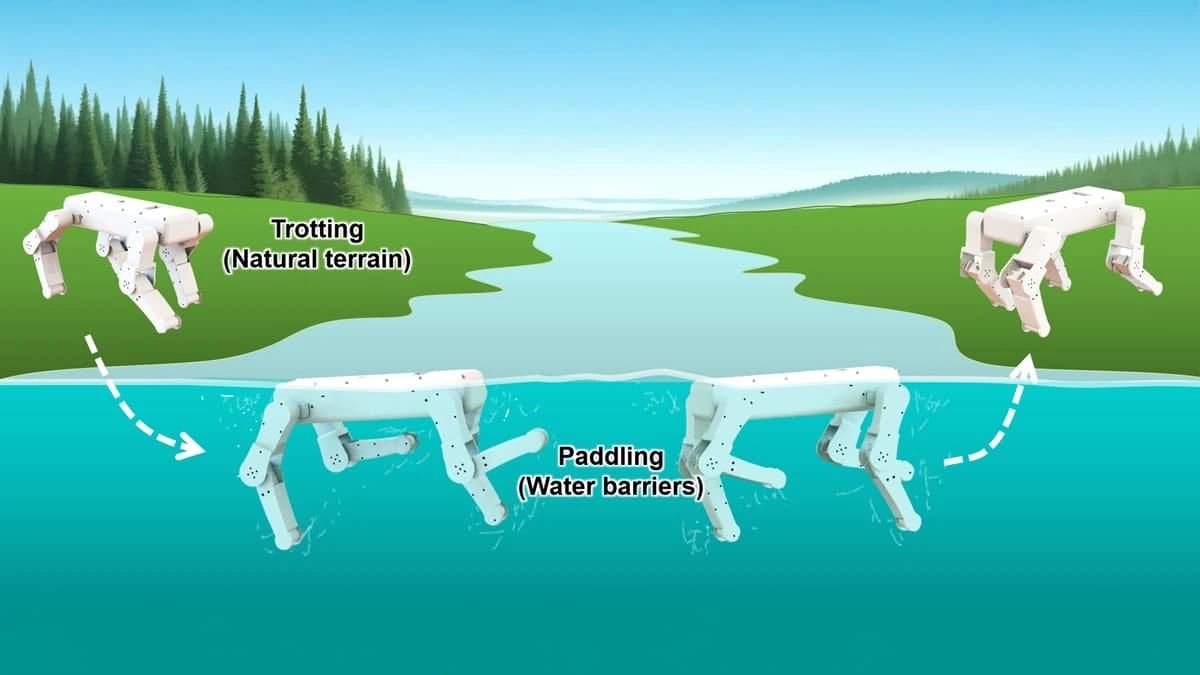
El perro robótico cuenta con una estructura de patas de doble articulación y tres modos distintos de remo: dos estilos similares a la técnica de “perrito” optimizados para velocidad y propulsión, y un estilo tipo trote pensado para una mayor estabilidad.
En las pruebas experimentales, el modo de nado tipo “perro” alcanzó una velocidad máxima de 0,576 km/h en agua, mientras que el modo trote ofreció mayor estabilidad. En tierra, el robot logró desplazarse a 1,26 km/h, una velocidad notable considerando su diseño anfibio.
Yunquan Li, autor correspondiente del estudio, destacó que este avance representa “un gran paso adelante en el diseño de robots inspirados en la naturaleza”.
Este perro robótico ofrece amplias posibilidades de aplicación: desde misiones de rescate y exploración ambiental hasta usos militares y científicos. Su capacidad para adaptarse a diferentes terrenos lo convierte en una herramienta versátil para entornos complejos.
El proyecto recibió asesoría biomecánica de la Universidad de West Chester (EE. UU.) y apoyo en diseño mecánico de la Universidad de Hong Kong. Su enfoque interdisciplinario refuerza el valor del diseño bioinspirado como vía para resolver desafíos técnicos en robótica móvil.
El estudio demuestra que imitar la locomoción natural de los mamíferos puede llevar a desarrollos robóticos más eficientes, funcionales y adaptables, consolidando una tendencia creciente hacia la robótica anfibia bioinspirada.
Referencias: IOP Publishing, DOI: 10.1088/1748-3190/adcd1b





