
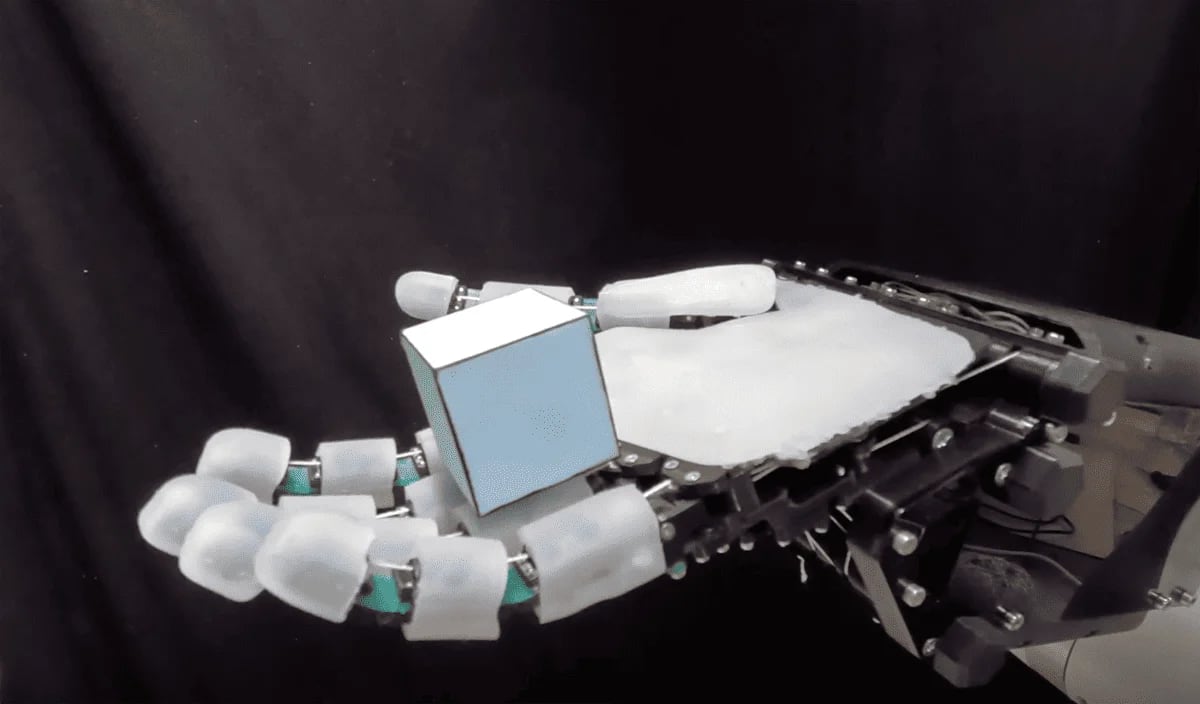
En un nuevo avance en robótica blanda, investigadores de la Escuela Politécnica Federal de Lausana (EPFL) han desarrollado una mano robótica llamada ADAPT, capaz de agarrar objetos de forma similar a la humana sin depender de complejas rutinas de programación. Esta mano, construida con materiales flexibles y articulaciones con resortes, logra movimientos autoorganizados inspirados en la biomecánica natural.
El dispositivo, controlado remotamente, fue capaz de recoger 24 objetos diferentes con una tasa de éxito del 93 %, imitando patrones de agarre humano con una similitud del 68 %. Según los investigadores del Laboratorio CREATE de la EPFL, estos resultados son fruto de la interacción inteligente entre los materiales suaves —como tiras de silicona— y la estructura distribuida de la rigidez programable en muñeca y dedos.
“Los humanos no necesitamos información precisa del entorno para coger una botella, por ejemplo. Nuestra piel, músculos y articulaciones flexibles hacen gran parte del trabajo”, explica Kai Junge, autor principal del estudio publicado en Nature Communications Engineering. “Eso es lo que hemos tratado de replicar: una inteligencia mecánica distribuida”.
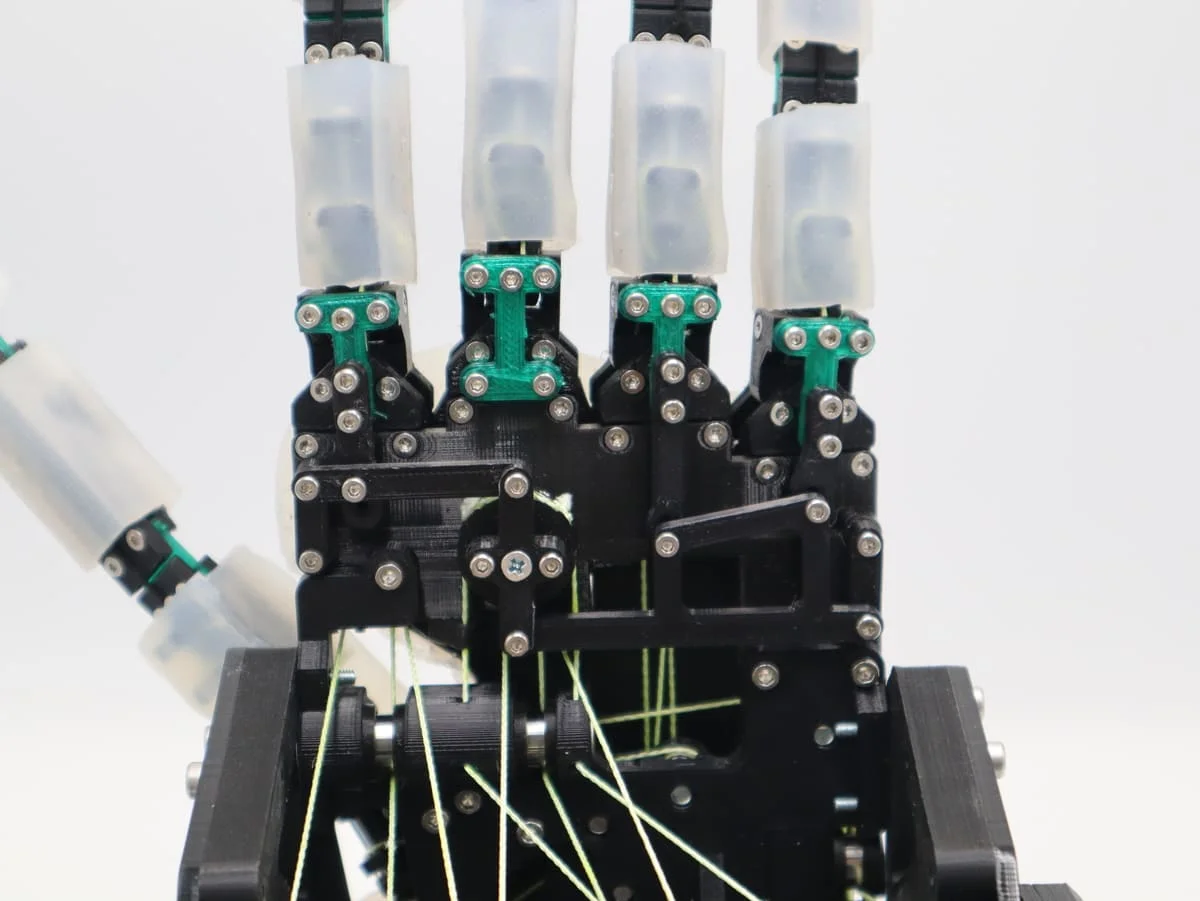
A diferencia de manos robóticas tradicionales, que requieren un motor por articulación, la mano ADAPT solo utiliza 12 motores alojados en la muñeca para mover 20 articulaciones. El resto del control se realiza gracias a la elasticidad y forma del material. Además, opera en modo bucle abierto: no recibe retroalimentación constante, sino que ajusta sus movimientos en función de su conformación mecánica.
En las pruebas, bastó con programar solo cuatro posiciones base para que el sistema pudiera adaptarse espontáneamente a objetos tan diversos como plátanos, tornillos o botellas. El equipo comparó su comportamiento con una versión rígida de la mano, y la flexibilidad demostró una robustez mucho mayor ante variaciones del entorno.
El experimento pone de relieve un nuevo enfoque para diseñar robots con mayor capacidad de adaptación a lo impredecible. “Estamos acostumbrados a pensar en inteligencia como algo centralizado en el cerebro del robot, pero aquí vemos que el propio cuerpo, si está diseñado con flexibilidad, puede resolver tareas por sí mismo”, destaca Junge.
Ahora, los investigadores trabajan en una nueva versión de la mano ADAPT que integre retroalimentación sensorial con sensores de presión en la piel de silicona, y algoritmos de inteligencia artificial para optimizar su respuesta en tiempo real. El objetivo es lograr una sinergia entre conformidad pasiva y control activo.
Este avance abre posibilidades para la interacción segura entre humanos y robots, especialmente en entornos inciertos, donde la precisión no siempre es posible. “La clave está en encontrar el equilibrio entre obediencia mecánica y control digital. Eso permitirá que los robots puedan operar en escenarios cotidianos, desde la asistencia personal hasta la manufactura flexible”, concluye Junge.





