

Vehículos inspirados en la física de las pelotas de golf prometen revolucionar el diseño de submarinos robóticos. Un equipo de la Universidad de Michigan desarrolló un prototipo esférico capaz de transformar su superficie de lisa a con hoyuelos, reduciendo el arrastre y generando sustentación sin piezas móviles.
Las pelotas de golf avanzan más gracias a los hoyuelos, que minimizan la fricción por presión en fluidos. Inspirados en este fenómeno, los investigadores idearon una esfera cubierta de látex que, mediante vacío, puede formar hendiduras precisas y revertirlas al instante, adaptando su textura a cada necesidad.
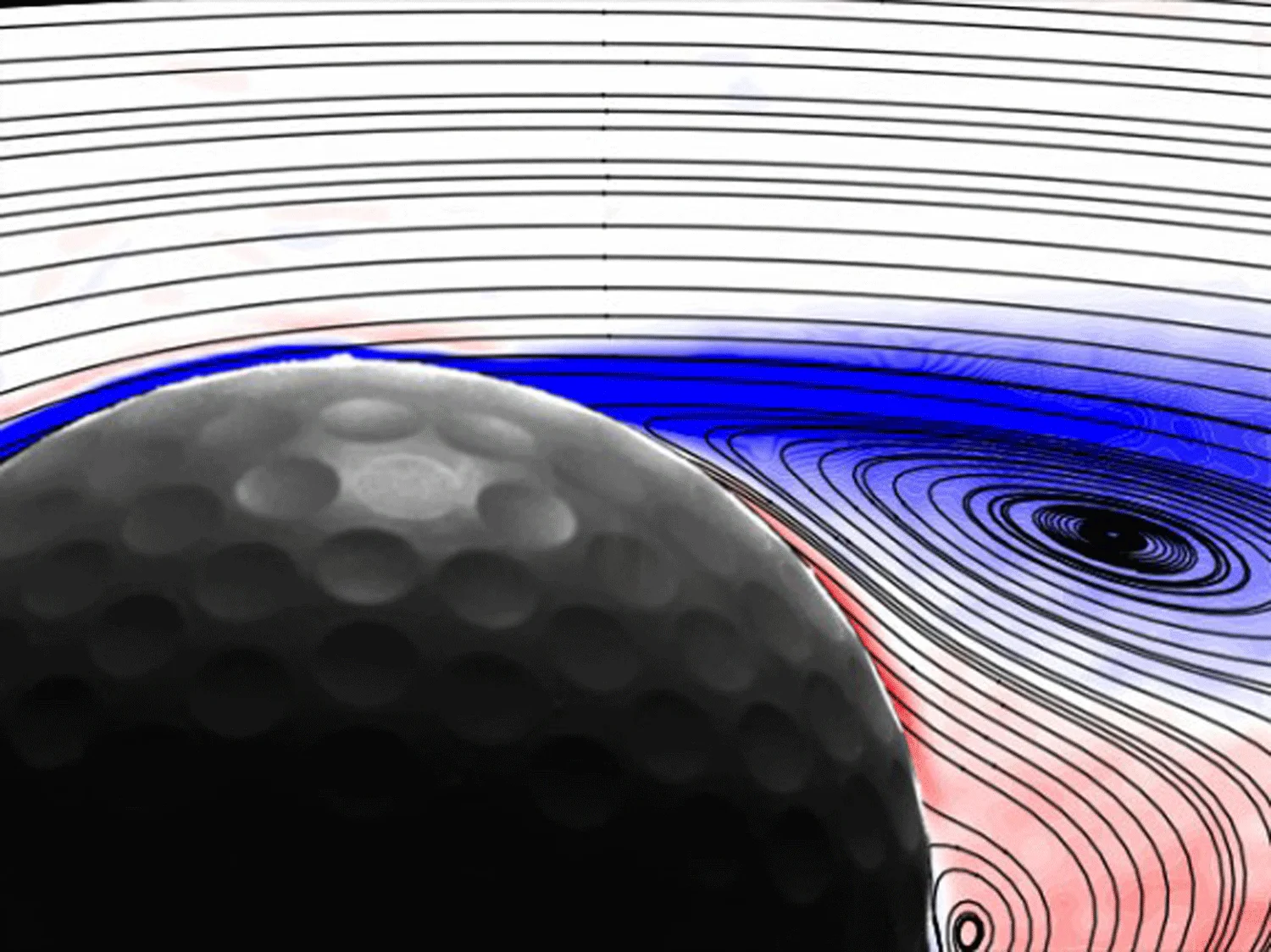
El nuevo prototipo se sometió a pruebas en túnel de viento, demostrando que la manipulación dinámica de los hoyuelos permite reducir la resistencia aerodinámica hasta en un cincuenta por ciento frente a superficies lisas. Con vientos fuertes, hoyuelos poco profundos optimizan el flujo, mientras que en condiciones suaves son preferibles los más profundos.
La clave está en la piel inteligente, capaz de detectar variaciones en la velocidad del aire y responder ajustando las cavidades para maximizar la eficiencia. Esto podría traducirse en un menor consumo de combustible en vehículos sumergidos o aéreos, mejorando el rendimiento y la autonomía en cada misión.
Además de reducir el arrastre, la esfera puede generar sustentación modificando la distribución de hoyuelos solo en un lado. Así, se consigue una separación asimétrica del flujo, lo que desvía la estela y aplica fuerza lateral gracias a la tercera ley de Newton. El efecto recuerda al efecto Magnus, aunque en este caso no requiere rotación, sino una inteligente gestión de la superficie.
Durante las pruebas, la esfera híbrida alcanzó fuerzas de sustentación que representan hasta el ochenta por ciento de la fuerza de arrastre. Esta capacidad permite maniobras precisas al activar selectivamente las hendiduras en el lado deseado, simplificando el diseño respecto a los vehículos convencionales que dependen de múltiples sistemas de propulsión.
El avance podría ser decisivo para submarinos robóticos compactos destinados a explorar o inspeccionar áreas difíciles de alcanzar. El sistema elimina la necesidad de timones y aletas, lo que reduce la complejidad y los costes de mantenimiento.
El equipo de Michigan prevé que, en el futuro, la integración de esta tecnología de piel dinámica con robótica blanda y nuevos materiales amplificará su potencial. Al permitir que el vehículo responda en tiempo real a las condiciones del flujo, se abren nuevas posibilidades para el diseño y control de vehículos no tripulados, tanto en el océano como en la atmósfera.
Referencias: 10.1017/flo.2025.7





